Hey @Alex3DHubs
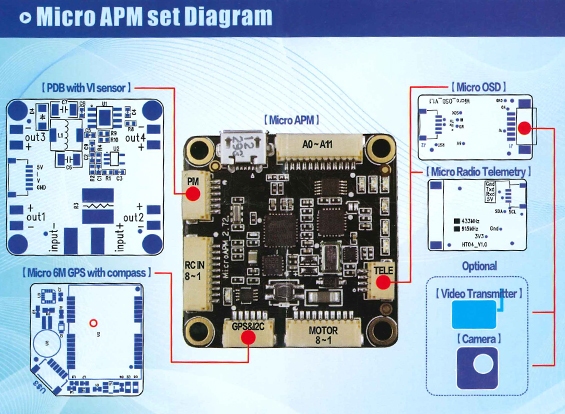
Yes i can tell you a bit more. The controller im using is a micro version of the ardupilot project.
"ArduPilot project, a family of open source autopilots based on the Arduino open source computing platform, developed by 3DR and the open source community. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles and is governed by an open source creative commons license. This product is based on the open source APM Project from 3D Robotics"
Her you can find the exact one im using in this build. Radio Control Planes, Drones, Cars, FPV, Quadcopters and more - Hobbyking
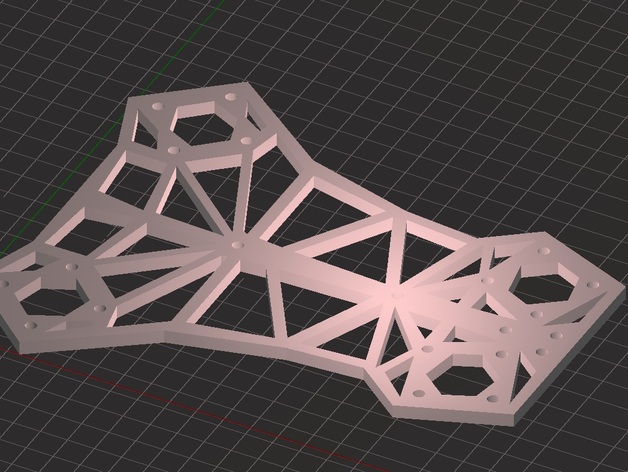
I chose to use it so i could fit everything inside the quad and nothing on the outside.
Instead of me doing a poor job at informing you i will direct you to the very extensive wiki build by the 3DR team:
_________________________________________________________________________________________
APM:Copter combines personal multicopters with advanced, autopilot technology, providing an autonomous aircraft that anyone can use. APM:Copter is developed and maintained by a dedicated group of volunteers from the open source community. Follow their continuing efforts and read about new project developments atDIYDrones.com.
This manual will guide you through setup and configuration to your first flight.
1. What is a Multicopter and How Does it Work: New to multicopters? This page gives an overview of what makes a multicopter fly and provides some considerations for getting started.
2. What You Need: All the components you’ll need for an autonomous multicopter plus some recommendations for sensors and accessories.
3. Safety Information: APM:Copter is a powerful, flying robot and requires a conscious awareness for safety concerns. Don’t skip this important section!
4. Choosing a frame: There are many choices (tri, quad, Y6, X8, tradheli, RTF vs Build-your-own), spend some time thinking about what you want it for and how much time and money you want to spend.
5. Choosing a controller: how to choose between the various ArduCopter capable controllers
6. Quick Start Guide for RTFs: Purchased a Ready-to-Fly APM:Copter from 3D Robotics? This guide will get you in the air faster than you can say “unmanned aerial vehicle”.
7. First Time Setup: Complete instructions for setting up and configuring ArduCopter

APM:Copter is an easy-to-set-up and easy-to-fly platform for multirotors and helicopters. Its features go far beyond the basic manual control RC multicopters on the market today. Unlike RC-only multicopters, APM:Copter is complete UAV solution, offering both remote control and autonomous flight, including waypoints, mission planning and telemetry displayed on a powerful ground station.
APM:Copter is on the cutting edge of aerial robotics and intended for those people who want to try advanced technology, leading edge techniques and new flight styles.
Features include:
-
High quality autolevel and auto altitude control – fly level and straight. Or fly the awesome “simple flight” mode, which makes APM:Copter one of the easiest multicopters to fly. Don’t worry about keeping an eye on your multicopter’s orientation–let the computer figure it out! You just push the stick the way you want to go, and the autopilot figures out what that means for whatever orientation the copter is in, using its onboard magnetometer. “Front”, “back”…who cares? Just fly!
-
No programming required. Just use an easy-to-use desktop utility to load the software with one click and set up APM:Copter with quick visual displays, a point-and-click mission planner and a full ground station option (see below).
-
Hundreds of GPS waypoints, free (the exact number depends on the memory of the hardware you’re using; APM support 127 waypoints, but platforms based on PX4 can accommodate many times that). Just point and click waypoints in the Mission Planner, and APM:Copter will fly itself to them. No distance limits! You can script entire missions, including camera control!
-
“Loiter” anywhere. Just flip the toggle switch and your copter will hold its position using its GPS and altitude sensors.
-
Return to launch. Flip a switch to have APM:Copter fly back to the launch location automatically.
-
Do all mission planning via a two-way wireless connection option. Waypoints, mode changing, even changing the gains of every control parameter can be done from your laptop, even while the copter is in the air!
-
Automatic takeoff and landing. Just flick a switch and watch APM:Copter execute its mission completely autonomously, returning home to land by itself in front of you when it’s done.
Due to the rich feature set and fully-autonomous capabilities of APM, the learning curve can appear somewhat intimidating. Fortunately, the APM suite of components has made this endeavor very straightforward and achievable.
Please do not be tempted to skip over steps and rush into flight. This is robotics and aviation combined–both of which are quite complex on their own. Follow the steps patiently, and you will have your robot safely up in the air.
Autonomous robots, flying machines, high-energy power systems, driving rotating blades — you are in charge of these potential hazards. Always follow best safety practices and pay close attention to safety warnings.
All of us involved with this project care a great deal about the privacy and safety of those whom we share this planet with. Please be a good steward of this technology. It is the product of many evenings and weekends, we make it available for benevolent use.
The APM:Copter Forum permits the developers to respond to your questions and enables you to research similar issues, Please choose the sub-forum that is most appropriate to the wiki page and issues you are having.